Исходным моментом в создании Левиным теории мотивации стали представления о том, что сознание детерминировано двояко: процессом ассоциации и волей. Он рассматривал их как отдельные тенденции. Левин показал, что детерминирующая тенденция, называемая им квазипотребностью, не является частным случаем, а, наоборот, является динамической предпосылкой любого поведения. Энергетическая составляющая поведения всегда представляла для Левина центральное звено в объяснении намерений и действий человека.
Тип энергии, осуществляющий психическую работу, Левин назвал психической энергией. Она высвобождается, когда психическая система пытается вернуть равновесие, вызванное неуравновешенностью. Последняя связана с нарастанием напряжения в одной части системы относительно других.
Первой сравнительно большой общетеоретической работой Левина, в которой он предложил достаточно детально разработанную общепсихологическую объяснительную модель поведенческой динамики, стала его книга "Намерение, воля и потребность", опиравшаяся на результаты первых экспериментов Овсянкиной, Зейгарник, Биренбаум, Карстен. В этой книге Левин, почти не дискутируя открыто с З. Фрейдом, предлагает весьма убедительный ответ академической психологии на вызов Фрейда, первым обратившего внимание на игнорировавшуюся до него область изучения побудительных сил человеческих поступков.
Ключевые понятия Левина вынесены в заголовок книги. Согласно Левину, основанием человеческой активности в любых ее формах, будь то ассоциация, поступок, мышление, память, является намерение - потребность. Потребности он рассматривает как напряженные системы, порождающие напряжение, разрядка которого происходит в действии при наступлении подходящего случая. Чтобы отличить свое понимание потребности от уже сложившегося в психологии и связанного главным образом с биологическими, врожденными потребностями, которые соотносятся с некоторыми внутренними состояниями, Левин называет их "квазипотребностями". В понятие волевых процессов он включает спектр преднамеренных процессов разной степени произвольности, обращая внимание на такой их признак, как произвольное конструирование будущего поля, в котором наступление самого действия должно произойти уже автоматически. Особое место занимает в модели Левина понятие ”Aufforderungscharakter", переводится этот термин как побудительность (там, где есть квалификатор чего) или побудитель (там, где такого уточнения нет). Квазипотребности образуются в актуальной ситуации в связи с принятыми намерениями и проявляются в том, что определенные вещи или события приобретают побудительность, контакт с которыми влечет за собой тенденцию к определенным действиям. Констатируя известный факт, что мы всегда воспринимаем предметы пристрастно, они обладают для нас определенной эмоциональной окраской, Левин замечает, что помимо этого они как бы требуют от нас выполнения по отношению к себе определенной деятельности: "Хорошая погода и определенный ландшафт зовут нас на прогулку, ступеньки лестницы побуждают двухлетнего ребенка подниматься и спускаться; двери - открывать и закрывать их". Побудительность может различаться по интенсивности и знаку (притягательный или отталкивающий), но это, по мнению Левина, не главное. Гораздо важнее то, что объекты побуждают к определенным, более или менее узкоочерченным действиям, которые могут быть чрезвычайно различными, даже если ограничиться только положительными побудителями. Приводимые Левином факты свидетельствуют о прямой связи изменений побудительности объектов с динамикой потребностей и квазипотребностей субъекта, а также его жизненных целей.
Левин дает богатое описание феноменологии побудительности, которая меняется в зависимости от ситуации, а также в результате осуществления требуемых действий: насыщение ведет к потере объектом и действием побудительности, а пресыщение выражается в смене положительной побудительности на отрицательную; одновременно положительную побудительность приобретают посторонние вещи и занятия, особенно в чем-то противоположные исходному. Действия и их элементы также могут утрачивать свою естественную побудительность в результате автоматизации. И наоборот: с повышением интенсивности потребностей не только усиливается побудительность отвечающих им объектов, но и расширяется круг таких объектов (голодный человек становится менее привередливым).
Левин полагал, что личность - сложная энергетическая система, а тип энергии, осуществляющий психологической работу, называется психической энергией. Психическая энергия высвобождается, когда человек пытается вернуть равновесие после того, как оказался в состоянии неуравновешенности. Неуравновешенность продуцируется возрастанием напряжения в одной части системы относительно др. частей в результате внешней стимуляции или внутренних изменений. Личность живет и развивается в психологическом поле окружающих ее предметов, каждый из которых имеет определенный заряд (валентность). Валентность - концептуальное свойство региона психологической среды, это ценность региона для человека. Его эксперименты доказывали, что для каждого человека эта валентность имеет свой знак, хотя в то же время существуют такие предметы, которые для всех имеют одинаково притягательную или отталкивающую силу. Воздействуя на человека, предметы вызывают в нем потребности, которые Левин рассматривал как своего рода энергетические заряды, вызывающие напряжение человека. В этом состоянии человек стремится к разрядке, т.е. к удовлетворению собственной потребности. Левин различал два рода потребностей - биологические и социальные (квазипотребности). Одно из наиболее известных уравнений Левина, которыми он описывал поведение человека в психологическом поле под влиянием различных потребностей, показывает, что поведение является одновременно функцией личности и психологического поля.
Для объяснения динамики Левин использует некоторые понятия. Напряжение - состояние внутриличностного региона относительно других внутриличностных регионов. Организм стремится к выравниванию напряжения данного региона по сравнению с другими. Психологическим средством выравнивания напряжения является процесс - мышление, запоминание и др. Потребность - возрастание напряжения или высвобождение энергии во внутриличностном регионе. Потребности в структуре личности не изолированы, но находятся в связи друг с другом, в определенной иерархии. Потребности делятся на физиологические состояния (истинные потребности) и намерения, или квазипотребности. Понятие потребности отражает внутреннее состояние индивида, состояние нужды, а понятие квазипотребности эквивалентно специфическому намерению удовлетворить потребность. "Это значит, что к намерению вынуждены прибегать тогда, когда нет естественной потребности в выполнении соответствующего действия, или даже когда налицо естественная потребность противоположного характера".
Дифференциация - одно из ключевых понятий теории "поля". и относится ко всем аспектам жизненного пространства. Например, для ребенка, по Левину, характерна большая подверженность влиянию среды и, соответственно, большая слабость границ во внутренней сфере, в измерении "реальность-нереальность" и во временной сфере. Возрастающую организованность и интеграцию поведения личности теория "поля". определяет как организационную взаимозависимость. С приходом зрелости возникает большая дифференциация и в самой личности, и в психологическом окружении, увеличивается прочность границ, усложняется система иерархических и селективных отношений между напряженными системами.
Конечной целью всех психических процессов является стремление вернуть человеку равновесие. Этот процесс может осуществляться путем поиска определенных валентных объектов психологической среды, которые могут снять напряжение.
Левиновский подход отличало два момента. Во-первых, он перешел от представления о том, что энергия мотива замкнута в пределах организма, к представлению о системе "организм-среда". Индивид и его окружение выступили в виде нераздельного динамического целого. Во-вторых, в противовес трактовке мотивации как биологически предопределенной константы, Левин полагал, что мотивационное напряжение может быть создано как самим индивидом, так и другими людьми (например, экспериментатором, который предлагает индивиду выполнить задание). Тем самым за мотивацией признавался собственно психологический статус. Она не сводилась более к биологическим потребностям, удовлетворив которые организм исчерпывает свой мотивационный потенциал.
Свое представление о мотивации Левин выводил из неразрывной связи субъекта и объекта. При этом противопоставление внутреннего и внешнего снималось, т.к они объявлялись разными полюсами единого пространства - поля по Левину. Для гештальтпсихологов поле - это то, что воспринимается в качестве непосредственно данного сознанию. Для Левина поле - это структура, в которой совершается поведение. Она охватывает мотивационные устремления индивида и одновременно объекты этих устремлений. Левин выводил поведение из факта взаимодействия личности и среды. Его не интересовали объекты как вещи, а лишь то, в каком отношении они находятся к потребностям личности. Мотивационные изменения выводились не из внутренних структур личности, а из особенностей самого поля, из динамики целого.
Эти результаты сближают позицию Левина с идеями Адлера и гуманистической психологией: важность сохранения целостности личности, ее Самости, необходимость осознания человеком структуры своей личности. Сходство этих концепций, к которым пришли ученые разных школ и направлений, говорит об актуальности данной проблемы, о том, что, осознав влияние бессознательного на поведение, человечество приходит к мысли о необходимости провести границу между человеком и другими живыми существами, понять не только причины его агрессивности, жестокости, сладострастия, которые великолепно объяснил психоанализ, но и основы его нравственности, доброты, культуры. Большое значение имело и стремление в новом мире, после войны, показавшей ничтожность и хрупкость человека, преодолеть складывающееся ощущение типичности и взаимозаменяемости людей, доказать, что люди - целостные, уникальные системы, каждый из которых несет в себе свой внутренний мир, не похожий на мир других людей.
Динамические системы довольно популярны в экономическом моделировании.
Типы процессов, происходящих в экономических системах:
- Детерминированные;
- Стохастические;
- Хаотические.
Для макроуровня, благодаря действиям объективных экономических законов и регуляторных воздействий государства, более характерные детерминированные процессы. Для микроуровня — стохастические (вероятностные).
При достаточно большом количестве наблюдений и обобщении исследуемого явления на более высоком уровне иерархии детерминированная компонента начинает превалировать, а стохастическая превращается в «шум».
При хаотичном характере исследуемой системы применения методов позволяет несколько облегчить изучение объекта за счет определения детерминированного механизма его поведения. Это, в свою очередь, позволяет уменьшить неопределенность познания системы.
Динамическая система — это такая система, параметры которой явно или неявно зависят от времени.
Итак, если для поведения системы заданные функциональные уравнения, то в них включены в явном виде переменные, относящиеся к разным моментам времени.
Важнейшие свойства сложных динамических систем
Рассмотрим самые важные свойства динамических систем.
1. Целостность (эмерджентность) динамических систем
В системе отдельные части функционируют совместно, составляя в совокупности процесс функционирования системы как целого. Совокупное функционирование разнородных взаимосвязанных элементов порождает качественно новые функциональные свойства целого, не имеющие аналогов в свойствах его элементов. Это означает принципиальную невозможность сведения свойств системы к сумме свойств ее элементов.
2. Взаимодействие динамической системы с внешней средой
Система реагирует на воздействие окружающей среды, эволюционирует под этим влиянием, но при этом сохраняет качественную определенность и свойства, отличающие ее от других систем.
3. Структура динамической системы
При исследовании системы структура выступает как способ описания ее организации. В зависимости от поставленной задачи исследования осуществляется декомпозиция системы на элементы и вводятся существенные для решаемой проблемы отношения и связи между ними. Декомпозиция системы на элементы и связи определяется внутренними свойствами данной системы. Структура динамична по природе, ее эволюция во времени и пространстве отражает процесс развития систем.
4. Бесконечность познания динамической системы
Под этим свойством понимается невозможность полного познания системы и всестороннего представления ее конечной множеством описаний, т.е. конечной количеством качественных и количественных характеристик. Поэтому система может быть представлена множеством структурных и функциональных вариантов, отражающих различные аспекты системы.
5. Иерархичность динамической системы
Каждый элемент в декомпозиции системы может рассматриваться как целостная система, элементы которой, в свою очередь, могут быть также представлены как системы. Но, с другой стороны, любая система — лишь компонент более широкой системы.
6. Элемент динамической системы
Под элементом понимается наименьшее звено в структуре системы, внутреннее строение которой не рассматривается на выбранном уровне анализа. Согласно свойства 5 любой элемент является системой, но на заданном уровне анализа эта система характеризуется только целостными характеристиками.
Целостность, структура, элемент, бесконечность и иерархичность составляют ядро системообразующих понятий общей теории систем и является основой системного представления объектов и формирования концепций системных исследований.
Для более подробного изучения свойств динамических экономических систем (ЭС) необходимо рассмотреть еще ряд дополнительных ее свойств характеристик.
- Состояние динамической системы . Состояние системы определяется состояниями ее элементов. Теоретически возможный набор состояний равно количеству возможных сочетаний всех состояний элементов. Однако взаимодействие составных частей приводит к ограничению количества реальных сочетаний. Изменение состояния элемента может происходить неявно, непрерывно и скачкообразно.
- Поведение динамических систем . Под поведением системы понимается закономерный переход из одного состояния в другое, обусловленный свойствами элементов и структурой.
- Непрерывность функционирования системы . Система существует, пока функционируют социально-экономические и иные процессы в обществе, которые не могут быть прерваны, иначе система перестанет функционировать. Все процессы в ЕС, как в живом организме, взаимосвязаны. Функционирования частей определяет характер функционирования целого, и наоборот. Функционирование системы связано с непрерывными изменениями, накопление которых приводит к развитию.
- Развитие динамической системы . Жизнедеятельность сложной системы является постоянным изменением фаз функционирования и развития, которая выражается в непрерывной функциональной и структурной перестройке системы, ее подсистем и элементов. Эволюция экономических систем обусловлена одной из важнейших свойств сложных систем — способностью к саморазвитию. Центральным источником саморазвития является непрерывный процесс возникновения и разрешения противоречий. Развитие, как правило, связан с усложнением системы, т.е. с увеличением ее внутреннего разнообразия.
- Динамичность системы . Экономическая система функционирует и развивается во времени, она имеет предысторию и будущее, характеризуется определенным жизненным циклом, в котором могут быть выделены определенные фазы: возникновение, рост, развитие, стабилизация, деградация, ликвидация или стимул к изменению.
- Сложность динамической системы . Экономическая система характеризуется большим количеством неоднородных элементов и связей, полифункциональностью, полиструктурностью, многокритериальностью, многовариантностью развития и свойствами сложных систем, поэтому она представляется, как сложная динамическая система .
- Гомеостатичность . Гомеостатичность отражает свойство системы к самосохранению, противодействие разрушающим воздействиям среды.
- Целеустремленность . Всем динамическим системам в экономике присуща целеустремленность, т.е. наличие определенных целей и стремление ее достижения. Развитие системы связан именно с изменением цели.
- Управляемость динамической системы . Осознанная организация целенаправленного функционирования системы и ее элементов называется управляемостью. В процессе жизнедеятельности система посредством целенаправленного управления решает постоянно возникающие в ней противоречия и реагирует на изменение внутренних и внешних условий своего существования. Согласно изменяющимся, она меняет свою структуру, корректирует цели развития и содержание деятельности элементов, т.е. происходит целенаправленная самоорганизация системы, которая на практике реализует способность к саморазвитию. Одной из основных функций самоорганизации является сохранение качественной уникальности системы в процессе ее эволюции.Свойства управляемости оказываются также в таких особенностях, как относительная автономность и функциональная управляемость.Относительная автономность функционирования экономических систем означает, что в результате действия обратной связи каждая из составляющих выходного сигнала может быть изменена за счет изменения входного сигнала, причем другие составляющие остаются не измененными. Функциональная управляемость экономической системы означает, что соответствующим выбором входного воздействия можно добиться любого выходного сигнала.
- Адаптивность динамической системы . Адаптивная экономической системы определяется двумя видами адаптации — пассивной и активной. Пассивная адаптация является внутренней характеристикой экономической системы, которая располагает определенными возможностями саморегулирования. Активная адаптация представляет механизм адаптивного управления экономической системой и организацию его эффективной реализации.
- Инерционность динамической системы . Инерционность экономической системы проявляется в возникновении запаздывания в системе, симптоматично реагирует на возмущения и управляющие воздействия.
- Устойчивость динамической системы . Система считается относительно устойчивой в определенно определенных пределах, если при достаточно малых изменениях условий функционирования его поведение существенно не меняется. В рамках теории систем исследуются структурная устойчивость и устойчивость траектории поведения системы. Устойчивость ЕС обеспечивается такими аспектами самоорганизации, как дифференциация и лабильность (чувствительность). Дифференциация — это стремление системы к структурной и функциональной разнообразия элементов, которая обеспечивает не только условия возникновения и разрешения противоречий, но и определяет способность системы быстро приспосабливаться к имеющимся условиям существования. Больше разнообразия — больше устойчивости, и наоборот. Лабильность означает подвижность функций элементов при сохранении устойчивости структуры системы в целом.
- Состояние равновесия динамической системы . Устойчивость системы связана с ее стремлением к состоянию равновесия, которое предполагает такое функционирование элементов системы, при котором обеспечивается повышенная эффективность движения к целям развития. В реальных условиях система не может полностью достичь состояния равновесия, хотя и стремится к нему. Элементы системы функционируют по-разному в разных условиях, и их динамическое взаимодействие постоянно влияет на движение системы. Система стремится к равновесию, на это направлены усилия управления, но, достигая его, она тут же от него уходит. Таким образом, устойчивая экономическая система постоянно находится в состоянии динамического равновесия, она непрерывно колеблется относительно положения равновесия, что является не только ее специфическим свойством, но и условием непрерывного возникновения противоречий как движущих сил эволюции.
На многообразиях и их подмножествах. Тесно связан с теорией дифференциальных уравнений , поскольку обыкновенное дифференциальное уравнение задает однопараметрическую группу диффеоморфизмов своего фазового пространства .
Эту область изучения часто называют просто «Динамические системы», «Теория систем», или длиннее как «Теория математических динамических систем».
Шаблон:Системы
Wikimedia Foundation . 2010 .
- Теория групп Ли
- Теория дифференциальных уравнений
Смотреть что такое "Теория динамических систем" в других словарях:
МЕТРИЧЕСКАЯ ТЕОРИЯ ДИНАМИЧЕСКИХ СИСТЕМ - то же, что эргодическая теория … Математическая энциклопедия
ЭНТРОПИЙНАЯ ТЕОРИЯ ДИНАМИЧЕСКИХ СИСТЕМ - раздел эргодической теории, тесно связанный с теорией вероятностен и теорией информации. Природа этой связи в общих чертах такова. Пусть {Tt} динамич. система (обычно измеримый поток или каскад)с фазовым пространством Wи инвариантной мерой Пусть … Математическая энциклопедия
Кафедра нелинейных динамических систем и процессов управления ВМК МГУ - Кафедра Нелинейных Динамических Систем и Процессов Управления факультета Вычислительной математики и кибернетики МГУ им М. В. Ломоносова (НДСиПУ ВМК МГУ). Заведующий кафедрой (с 1989 года) – лауреат Ленинской, Государственных (СССР и РФ),… … Википедия
Теория катастроф (математика) - Теория катастроф раздел математики, включающий в себя теорию бифуркаций дифференциальных уравнений (динамических систем) и теорию особенностей гладких отображений. Термины «катастрофа» и «теория катастроф» были введены Рене Томом (René Thom) и… … Википедия
Теория бифуркаций - динамических систем это теория, которая изучает изменения качественной картины разбиения фазового пространства в зависимости от изменения параметра (или нескольких параметров). Содержание 1 Обзор 2 Бифуркация равновесий … Википедия
Теория линейных стационарных систем - раздел теории динамических систем, изучающий поведение и динамические свойства линейных стационарных систем (ЛСС). Широко используется в процессе управления техническими системами, цифровой обработке сигналов и других областях инженерного дела.… … Википедия
Теория случайных матриц - Теория случайных матриц раздел математической статистики, изучающий свойства ансамблей матриц, элементы которых распределены случайным образом. Как правило задаётся закон распределения элементов. При этом изучается статистика собственных… … Википедия
Теория узлов - Теория узлов изучение вложений одномерных многообразий в трёхмерное евклидово пространство или в сферу. В более широком смысле предметом теории узлов являются вложения сфер в многообразия и вообще вложения многообразий. Содержание 1… … Википедия
Теория Колмогорова - Теория Колмогорова Арнольда Мозера, или теория КАМ названная в честь её создателей, А. Н. Колмогорова, В. И. Арнольда и Ю. Мозера, ветвь теории динамических систем, изучающая малые возмущения почти… … Википедия
Теория катастроф (значения) - Теория катастроф: Теория катастроф раздел математики, включающий в себя теорию бифуркаций дифференциальных уравнений (динамических систем) и теорию особенностей гладких отображений. Катастрофизм (теория катастроф) система… … Википедия
Книги
- Синхронизация динамических систем , . В настоящей книге делается попытка систематического изложения фактов и результатов, относящихся к быстро развивающейся области науки и техники- синхронизации динамических систем. Книга… Купить за 735 руб
- Теория динамических систем , Г. А. Степаньянц. Настоящая книга посвящена изложению основ общей теории динамических систем, созданной трудами ряда выдающихся отечественных и зарубежных математиков. Знакомствос этой теорией позволяет…
Динамическая система - множество элементов, для которого задана функциональная зависимость между временем и положением в фазовом пространстве каждого элемента системы. [ ] Данная математическая абстракция позволяет изучать и описывать эволюцию систем во времени.
Состояние динамической системы в любой момент времени описывается множеством вещественных чисел (или векторов), соответствующим определённой точке в пространстве состояний . Эволюция динамической системы определяется детерминированной функцией, то есть через заданный интервал времени система примет конкретное состояние, зависящее от текущего.
Введение
Динамическая система представляет собой такую математическую модель некоего объекта, процесса или явления, в которой пренебрегают «флуктуациями и всеми другими статистическими явлениями».
Динамическая система также может быть представлена как система, обладающая состоянием . При таком подходе, динамическая система описывает (в целом) динамику некоторого процесса, а именно: процесс перехода системы из одного состояния в другое. Фазовое пространство системы - совокупность всех допустимых состояний динамической системы. Таким образом, динамическая система характеризуется своим начальным состоянием и законом, по которому система переходит из начального состояния в другое.
Различают системы с дискретным временем и системы с непрерывным временем.
В системах с дискретным временем, которые традиционно называются каскадами , поведение системы (или, что то же самое, траектория системы в фазовом пространстве) описывается последовательностью состояний. В системах с непрерывным временем, которые традиционно называются потоками , состояние системы определено для каждого момента времени на вещественной или комплексной оси. Каскады и потоки являются основным предметом рассмотрения в символической и топологической динамике.
Динамическая система (как с дискретным, так и с непрерывным временем) часто описывается автономной системой дифференциальных уравнений , заданной в некоторой области и удовлетворяющей там условиям теоремы существования и единственности решения дифференциального уравнения. Положениям равновесия динамической системы соответствуют особые точки дифференциального уравнения, а замкнутые фазовые кривые - его периодическим решениям.
Основное содержание теории динамических систем - это исследование кривых, определяемых дифференциальными уравнениями . Сюда входит разбиение фазового пространства на траектории и исследование предельного поведения этих траекторий: поиск и классификация положений равновесия, выделение притягивающих (аттракторы ) и отталкивающих (репеллеры ) множеств (многообразий). Важнейшие понятия теории динамических систем - устойчивость состояний равновесия (т.е. способность системы при малых изменениях начальных условий сколь угодно долго оставаться около положения равновесия или на заданном многообразии) и грубость (т.е. сохранение свойств при малых изменениях самой математической модели; «грубая система - это такая, качественный характер движений которой не меняется при достаточно малом изменении параметров»).
Привлечение вероятностно-статистических представлений в эргодической теории динамических систем приводит к понятию динамической системы с инвариантной мерой .
Современная теория динамических систем является собирательным названием для исследований, где широко используются и эффективным образом сочетаются методы из различных разделов математики: топологии и алгебры, алгебраической геометрии и теории меры, теории дифференциальных форм, теории особенностей и катастроф.
Методы теории динамических систем востребованы в других разделах естествознания, таких как неравновесная термодинамика , теория динамического хаоса , синергетика .
Определение
Пусть X {\displaystyle X} - произвольное гладкое многообразие .
Динамической системой , заданной на гладком многообразии X {\displaystyle X} , называется отображение g: R × X → X {\displaystyle g\colon R\times X\to X} , записываемое в параметрическом виде g t (x) {\displaystyle g^{t}(x)} , где t ∈ R , x ∈ X {\displaystyle t\in R,x\in X} , которое является дифференцируемым отображением, причём g 0 {\displaystyle g^{0}} - тождественное отображение пространства X {\displaystyle X} . В случае стационарных обратимых систем однопараметрическое семейство { g t: t ∈ R } {\displaystyle \{g^{t}:t\in R\}} образует группу преобразований топологического пространства X {\displaystyle X} , а значит, в частности, для любых t 1 , t 2 ∈ R {\displaystyle t_{1},t_{2}\in R} выполняется тождество g t 1 ∘ g t 2 = g t 1 + t 2 {\displaystyle g^{t_{1}}\circ g^{t_{2}}=g^{t_{1}+t_{2}}} .
Из дифференцируемости отображения g {\displaystyle g} следует, что функция g t (x 0) {\displaystyle g^{t}(x_{0})} является дифференцируемой функцией времени, её график расположен в расширенном фазовом пространстве R × X {\displaystyle R\times X} и называется интегральной траекторией (кривой) динамической системы. Его проекция на пространство X {\displaystyle X} , которое носит название фазового пространства , называется фазовой траекторией (кривой) динамической системы.
Задание стационарной динамической системы эквивалентно разбиению фазового пространства на фазовые траектории. Задание динамической системы в общем случае эквивалентно разбиению расширенного фазового пространства на интегральные траектории.
Способы задания динамических систем
Для задания динамической системы необходимо описать её фазовое пространство X {\displaystyle X} , множество моментов времени T {\displaystyle T} и некоторое правило , описывающее движение точек фазового пространства со временем. Множество моментов времени T {\displaystyle T} может быть как интервалом вещественной прямой (тогда говорят, что время непрерывно ), так и множеством целых или натуральных чисел (дискретное время). Во втором случае «движение» точки фазового пространства больше напоминает мгновенные «скачки» из одной точки в другую: траектория такой системы является не гладкой кривой, а просто множеством точек, и называется обычно орбитой. Тем не менее, несмотря на внешнее различие, между системами с непрерывным и дискретным временем имеется тесная связь: многие свойства являются общими для этих классов систем или легко переносятся с одного на другой.
Фазовые потоки
Пусть фазовое пространство X {\displaystyle X} представляет собой многомерное пространство или область в нем, а время непрерывно. Допустим, что нам известно, с какой скоростью движется каждая точка x {\displaystyle x} фазового пространства. Иными словами, известна вектор-функция скорости v (x) {\displaystyle v(x)} . Тогда траектория точки будет решением автономного дифференциального уравнения d x d t = v (x) {\displaystyle {\frac {dx}{dt}}=v(x)} с начальным условием x (0) = x 0 {\displaystyle x(0)=x_{0}} . Заданная таким образом динамическая система называется фазовым потоком для автономного дифференциального уравнения.
Каскады
Пусть X {\displaystyle X} - произвольное множество, и f: X → X {\displaystyle f\colon X\to X} - некоторое отображение множества X {\displaystyle X} на себя. Рассмотрим итерации этого отображения, то есть результаты его многократного применения к точкам фазового пространства. Они задают динамическую систему с фазовым пространством X {\displaystyle X} и множеством моментов времени T = N {\displaystyle T=\mathbb {N} } . Действительно, будем считать, что произвольная точка x 0 ∈ X {\displaystyle x_{0}\in X} за время 1 {\displaystyle 1} переходит в точку x 1 = f (x 0) ∈ X {\displaystyle x_{1}=f(x_{0})\in X} . Тогда за время 2 {\displaystyle 2} эта точка перейдет в точку x 2 = f (x 1) = f (f (x 0)) {\displaystyle x_{2}=f(x_{1})=f(f(x_{0}))} и т. д.
Если отображение f {\displaystyle f} обратимо, можно определить и обратные итерации : x − 1 = f − 1 (x 0) {\displaystyle x_{-1}=f^{-1}(x_{0})} , x − 2 = f − 1 (f − 1 (x 0)) {\displaystyle x_{-2}=f^{-1}(f^{-1}(x_{0}))} и т. д. Тем самым получаем систему с множеством моментов времени T = Z {\displaystyle T=\mathbb {Z} } .
Примеры
- Система дифференциальных уравнений
задает динамическую систему с непрерывным временем, называемую «гармоническим осциллятором». Её фазовым пространством является плоскость (x , v) {\displaystyle (x,v)} , где v {\displaystyle v} - скорость точки x {\displaystyle x} . Гармонический осциллятор моделирует разнообразные колебательные процессы - например, поведение груза на пружине. Его фазовыми кривыми являются эллипсы с центром в нуле.
Вопросы теории динамических систем
Имея какое-то задание динамической системы, далеко не всегда можно найти и описать её траектории в явном виде. Поэтому обычно рассматриваются более простые (но не менее содержательные) вопросы об общем поведении системы. Например:
- Есть ли у системы замкнутые фазовые кривые, то есть может ли она вернуться в начальное состояние в ходе эволюции?
- Как устроены инвариантные многообразия системы (частным случаем которых являются замкнутые траектории)?
- Как устроен аттрактор системы, то есть множество в фазовом пространстве, к которому стремится «большинство» траекторий?
- Как ведут себя траектории, выпущенные из близких точек - остаются ли они близкими или уходят со временем на значительное расстояние? Ссылки
Понятия системы, основные характеристики системы.
Система – это совокупность элементов, находящихся во взаимодействии и связаны определенной структурой.
Базовый блок любой системы – составляющие ее элементы, каждый элемент характеризуется набором состояний, в которой он может находиться.
Схема функционирования элемента системы:
Для многих систем характерен принцип обратной связи – выходной сигнал может использоваться для коррекции управления.
S(t) – состояние элемента в момент t.
U(t) – управление элементом в момент t.
a(t) – внешняя среда элемента в момент t.
E(t) – случайные воздействия элемента в момент t.
Y(t) – выходной сигнал элемента в момент t.
В общем случае описание функционирования элемента системы производится при помощи системы дифференциальных или разностных уравнений следующего вида:
Y(t) =f(S(t), S(t-1), …,U(t),U(t-1),…,a(t),a(t-1),…,E(t),E(t-1),…)
(Y(t) = g (S(t), a(t), E(t)) (1)
Примеры структуры системы:
линейная (последовательная):
![]()
иерархическая (древовидная):

радиальная (звездообразная):

сотовая или матричная:

многосвязная – с произвольной структурой.
При анализе динамических систем рассмотрим решение следующих задач:
Задача наблюдения – состоит в определении состояния системы в момент времени S(t) по данным выходных величин (о их поведении) в будущем.
Найти S(t)
, зная,
 для системы с дискретным временем.
для системы с дискретным временем.
 для систем с
непрерывным временем.
для систем с
непрерывным временем.
Задача идентификации – в определении текущего состояния S(t) по данным о поведении выходных величин в прошлом.
3. Задачи прогнозирования – определение будущих состояний по данным ткущих и
прошлых значений.
Найти S
(t+1),
S
(t+2),…
зная

Задача поиска управления – найти управляющую последовательность U(t), U(t+1),…, U(S), S > t, которая приводит систему из состояния S(t) = X в состояние S(S) = Y.
Задача синтеза максимального управления – состоит в определенной оптимальной последовательности управляющих воздействий U*(t) решающий задачу 4 и максимальную целевую функцию или функциональную:
F(S(t)), t = 0,1,2,…
Типы систем:
По наличию случайных факторов:
Детерминированные
Стохастические – влиянием случайных факторов нельзя принебреч.
2. По учету фактора времени:
Системы с непрерывным временем
Системы с дискретным временем
3. По влиянию прошлых периодов:
Марковские системы – для решения 1 и 2 задач нужна информация только за непосредственно предшествующий или последующий период. Для Марковской систем уравнение (1) принимает вид: G(S(t), S(t-1), U(t), U(t-1), a(t), a(t-1), E(t), E(t-1)) = 0
Немарковские.
Некоторые общие свойства систем:
причинность – возможность предсказывать последствия некоторых последствий в будущем. Част. случай: предопределенность системы означает, что в сущности такие состояния, для которых вся будущая эволюция системы может быть вычислена на базе прошлых наблюдений.
управляемость – состоит в том, что подходящим выбором входного воздействия U можно добиться любого входного сигнала Y.
устойчивость – система является устойчивой, если при достаточно малых изменениях условий ее функционирования поведение системы существенно не изменится.
инерционность – возникновение запаздываний в системе при реакции (запаздывания) на изменение управления и (или) внешней среды.
адаптивность – способность системы изменять поведения и (или) свою структуру в ответ на изменение внешней среды.
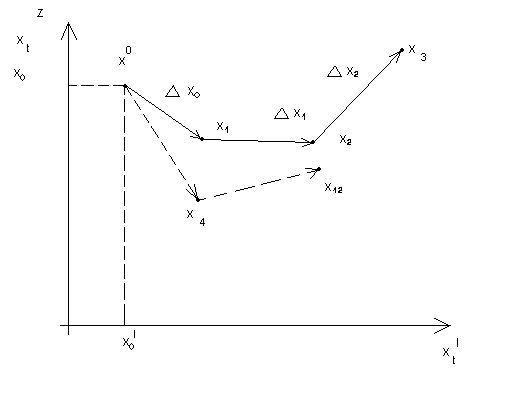
Детерминированные динамические системы с дискретным временем.
Многие приложения в экономике требуют моделирования систем во времени.
Состояние системы в момент времени t описывается мерным вектором X(t).
X(t)
= ….. , X
(t)
 R n
(R
– множество всех вещественных чисел)
R n
(R
– множество всех вещественных чисел)
t

Эволюция системы со временем описывается функцией
G
(X 0 ,
t,
 )
, где
)
, где
X 0 – начальное состояние системы;
t – время;
 -
вектор параметров.
-
вектор параметров.
Функция g(*) называют также переходной функцией
Функция g(*) – это правило, описывающее текущее состояние как функцию от времени, начальных условий и параметров.
Например: X t
= X 0
(1+ ) t
= g
(X 0 ,
t,
) t
= g
(X 0 ,
t,
 )
)
Функция g(*) как правило не известна. Обычно она задана неявно как решение системы разностных уравнений.
Разностное уравнение
или система уравнений – это уравнения
в следующей форме: F
(t,
X t ,
X t +1 ,
…, X t + m ,
 ) = 0 (1),
где
) = 0 (1),
где
X t – состояние системы в момент времени t.
Решение уравнения (1) – это последовательность векторов
X t
=
 X 0 ,
X 1 ,…,
X 0 ,
X 1 ,…,

Обычно предполагается, что уравнение (1) можно решить аналитически относительно X t + m и переписать в форме так называемых уравнений – состояний:
X t+m
= f (t, X t ,
X t+1 ,
…,X t+m-1 ,
 )(2)
)(2)
Например:
X t +2
= X t
+ X t +1 /2
+
 t
t
Любую систему представляют в форме (2) всегда можно?
Разностное
уравнение (2)
называется
линейным, если F(*)
является линейной фуекцией переменных
состояний (не обязательно линейно
относительно
 )
)
В уравнениях (1) и (2) величина m называется порядком системы не является серьезным ограничением, так как системы более высокого порядка путем введения дополнительных переменных и уравнений.
Пример: X t = f (X t -1 , Y t -1) – система 2-го порядка
Введем Y t
= X t -1
X t = f(X t -1 , Y t -1)
Таким образом, мы будем рассматривать только системы 1-го порядка следующего вида:
X t -1
= f(t,
X t ,
 )
(3)
)
(3)
Уравнение (3) называется автономным, если t не входит в него отдельным аргументом.
Пример:
Рассмотрим динамику основных фондов на предприятии
K t – стоимость основных фондов предприятия в период t.
 -
норма амортизации, то есть % основных
фондов, которые изъяли на предприятии
за год.
-
норма амортизации, то есть % основных
фондов, которые изъяли на предприятии
за год.
I t = инвестиции в основные фонды.
K t +1
= (1 -
 )K t
+ I t
– уравнение 1-го порядка, линейное, если
I t
= I,
тогда
)K t
+ I t
– уравнение 1-го порядка, линейное, если
I t
= I,
тогда
K t +1
= (1 -
 )K t
+ I
– уравнение автономное
)K t
+ I
– уравнение автономное
Если I t = I(t) – неавтономное (зависит от t)
Решение уравнения
(3) – это последовательность векторов
состояния {X t },
удовлетворяющих уравнению (3) для всех
возможных состояний. Эта последовательность
называется траекторией системы. Уравнение
(3) показывает, как состояние системы
изменяется от периода к периоду, а
траектория системы дает ее эволюцию
как функцию начальных условий и состояния
внешней среды
 .
.
Если известно начальное состояние X 0 , легко получить последовательность решений путем итеративного применения отношения (3), получим переходную функцию следующим образом:
X t +1
= f
(t,
X t ,
 )
)
X 1
= f (0, X 0 ,
 )
= g (0, X 0 ,
)
= g (0, X 0 ,
 )
)
X 2
=
f (1, X,
 )
= f (1; f (0, X 0 ,
)
= f (1; f (0, X 0 ,
 );
); )
= g (1, X 0 ,
)
= g (1, X 0 ,
 )
)
X t+1
= f (t, X t ,
 )
= f (t, g, (t – 1, X 0 ,
)
= f (t, g, (t – 1, X 0 ,
 ),
), )
= g (t, X 0 ,
)
= g (t, X 0 ,
 )
)
Если f (*) однозначная, всюду определенна функция, то существует уникальное решение уравнения (3) для любого X 0 .
Если функция имеет
вид f
(t,
X t ,
 )
=
)
=
 /
X t
– не всюду опрделенная.
/
X t
– не всюду опрделенная.
Если f
(*) непрерывная дифференциальная функция,
то решение также будет гладким относительно
 и X 0
и X 0
Полученное решение зависит от начального состояния X 0 .
Задача с граничным условием состоит из уравнения (3) и граничного условия, задаваемого в формуле:
X s = X s (4)
Если в уравнении (4) – S = 0 , то оно называется начальным состоянием.
Уравнение (3) имеет много решений, а уравнение (3) + (4) – система – единственное решение, поэтому различают общее и частное решение разностного уравнению (3):
X t g
= X(t,
c,
 ) = {X t (X t +1
= f
(t,
X t ,
) = {X t (X t +1
= f
(t,
X t ,
 ))}
, где параметр е индексирует частное
решение.
))}
, где параметр е индексирует частное
решение.
X t – размер вклада в момент t
Z - % я ставка
X t +1 = X t (1+ z) ; X 0 = …
X 1 = X 0 (1 + z)
X 2 = X 1 (1 + z) = X 0 (1 + z) 2 = g (X 0 , t, z) , где t = 2

Если можно найти общее решение системы (3) . у нас будет полная информация о поведении системы со временем, будет легко определить, как система реагирует на изменение параметров.
К сожалению, общее решение существует только для определенных классов l – го порядка (в частности для линейных систем)
Автономные системы
Поведение автономных систем задается разностным уравнением
X t +1
= f
(X t ,
 )
(1)
)
(1)
Автономные системы моделируют ситуации, где структура системы остается неизменной со временем. Это дает возможность использовать для анализа графический метод.
X t =1
= f
(t,
X t ,
 )
)
 X t
= X t +1
– X t
= f
(t,
X t ,
X t
= X t +1
– X t
= f
(t,
X t ,
 )
- X t
= d
(t,
X t ,
)
- X t
= d
(t,
X t ,
 )
(2)
)
(2)
Функция d
(*) показывает на сколько изменится
состояние системы от периода к периоду.
В каждой точке X t
можно сопоставить вектор
 X t
в соответствующем уравнении (2) Функция
d
(*) в этом контексте называется векторным
полем
X t
в соответствующем уравнении (2) Функция
d
(*) в этом контексте называется векторным
полем
 X 0 /t
= 0
X 0 /t
= 0
Для автономных
систем
 и
и
В автономных системах все системы, попавшие когда-либо в т. Х 0 в последствии следуют одной и той же траекторией. В неавтономных системах поведение зависит также и от того, когда система попала в т. Х 0.
При начальном условии Х 0 для автономных систем применим уравнение (1):
 дважды
последовательно примененная.
дважды
последовательно примененная.
В выше приведенной системе f t означает результат t-кратного итеративного применения функции f () к своему аргументу. Функция f t показывает, куда перейдет система за t периодов из начального состояния.

X t – куда перейдет система из т. Х 0 за t периодов времени.
Функция f t иногда называется потоком системы.
Устойчивые состояния. Периодические равновесия. Стабильность .
С течением времени система переходит к устойчивому состоянию. Поэтому нас будет интересовать асимптотическое поведение системы при t → ∞.
Рассмотрим систему


Следовательно,
если

 существует, то
существует, то .
.
Точка Х, удовлетворяющая
уравнению
 называется неподвижной точкой отображения
называется неподвижной точкой отображения .
.
Точка
 называется в контексте динамических
систем устойчивым состоянием или
стационарным состоянием.
называется в контексте динамических
систем устойчивым состоянием или
стационарным состоянием.
Неподвижные точки широко используются для изучения долговременного поведения динамических систем.

если
 ,
то 1 в противном случае 0
,
то 1 в противном случае 0
Теория устойчивости Ляпунова
Точка
 называется стабильной по Ляпунову, если
для любого числа
называется стабильной по Ляпунову, если
для любого числа существует такое число
существует такое число ,
, ,
что из условия
,
что из условия для всех
для всех .
.


 –длина вектора
на плоскости.
–длина вектора
на плоскости.
 –равновесное
состояние.
–равновесное
состояние.
 –норма вектора
Х.
–норма вектора
Х.


Точка
 будет стабильной по Ляпунову в том
случае, когда система один раз попав в
окрестность точки
будет стабильной по Ляпунову в том
случае, когда система один раз попав в
окрестность точки и в дальнейшем останется в окрестности
и в дальнейшем останется в окрестности .
.
Точка
 называется асимптотически устойчивой
по Ляпунову если:
называется асимптотически устойчивой
по Ляпунову если:

Для асимптотически устойчивых систем с течением времени система подходит все ближе и ближе к своему равновесному состоянию.
Система ведет себя так:



 –поток системы
–поток системы
 –куда перейдет
система через к шагов
–куда перейдет
система через к шагов
Периодическим
решением динамической системы
 называется решение в форме
называется решение в форме ,
где р – период системы или период
траектории.
,
где р – период системы или период
траектории.
Таким образом,
периодическое решение является
неподвижной точкой отображения
 .
.

Неподвижная точка

Проверим, есть ли
неподвижная точка
 :
:
 любая точка
является неподвижной.
любая точка
является неподвижной.



Скалярные линейные системы
Скалярные линейные
системы имеют форму:
 (1)
(1)
 –уравнение,
подданное в момент t.
–уравнение,
подданное в момент t.
Если в уравнении
(1)
 ,
то
,
то ,
то оно называется однородным.
,
то оно называется однородным.
Однородные линейные системы
Для скалярных
систем удобно анализировать поведение
системы при помощи фазовой диаграммы.
Фазовая диаграмма – это график зависимости

Случай 1. 0 Является аналитически
стабильной Для 0 Случай 2. -1 Затухающие колебания Случай 3. а>1 Случай 4.
а<-1 Случай 5.
а
= 1 Случай 6.
а
= 0 Случай 7.
а
= -1 x t+1
= -x t Если
Общее решение
однородных линейных систем имеет вид: При
Неоднородные
линейные системы первого порядка
При анализе
неоднородных систем важную роль играет
принцип «суперпозиции». Он заключается в
том, что общее решение уравнения (1) может
быть записано в форме уравнения: где
Автономное уравнение
(1)
1.
2.
Доказательство: Если
Если
Рассмотрим функцию
2. [Необходимость]
Мы показали, что если мы начнем с
какого-либо решения
Пусть у нас есть
два решения (1),
Обозначим
Автономные линейные
системы Х t +1 =ax t +U (3) Если
Если
В случае, когда
Если
Общее решение (3)
имеет вид: Рассмотрим граничное
условие x s =x s: Неавтономные
линейные системы X t +1 =ax t +U t X t+1 =ax t +U t =a(ax t-1 +U t-1)+U t =a 2
x t-1 +a
U t-1 +
U t =
a 2
(ax t-2 +U t-2)+
aU t-1 +
U t =
a 3
x t-2 +a
U t-2 +
aU t-1 +
U t)= Если
Если
Предположим,
последовательность U t
является ограниченной, т.е. U t ≤ Тогда
-
пограничное
значение. ЭКОНОМИЧЕСКИЕ
ПРИЛОЖЕНИЯ ТЕОРИИ ЛИНЕЙНЫХ СИСТЕМ Паутинообразная
модель рыночного равновесия. Основные предположения
модели: линейный характер
кривой спроса линейный характер
кривой предложения равенство кривой
спроса и предложения Предложение: Равновесие: d 0 -d 1 P t =S 0 +S 1 P t-1 d 1 P t =d 0 -S 0
–S 1 P t-1
│:d 1 P t = Для того чтобы
цены с течением времени сходились к
равновесной цене, необходимо, чтобы
отношение
предложения круче,
чем кривая спроса. d 1 p * =d 0 -S 0 -S 1 p * Для
более
рационального поведения производители
в своих решениях должны учитывать не6
только текущую, но и будущую конъюнктуру
рынка. Таким образом, для нормального
функционирования рынка важна способность
экономических агентов формировать
ожидание будущего (делать прогнозы). Динамика цен на
финансовых рынках. S
– предложение недвижимости D
– спрос на недвижимость P t
– стоимость
акций в момент t. d t
– дисиденті
в момент t. r
–процентная ставка по депозитным
счетам. Арбитражем
называется ситуация, позволяющая
получить инвестору немедленную прибыль
без риска за счет покупки актива по
низкой цене и его немедленной перепродажи
по более высокой цене. Считается что
рынок является эффективным, если на нем
отсутствуют возможности для арбитража. Воспользуемся
принципом отсутствия арбитража, чтобы
получить балансовое соотношение для
стоимости акций. На примере
Харьковской недвижимости: P t =30
тыс.дол. D t =2
тыс.дол. в год – плата за сдачу жилья МЕХАНИЗМЫ
ФОРМИРОВАНИЯ ОЖИДАНИЙ 1. Модель адаптивных
ожиданий 0
1
Предположим, что
d t =d=const
для любого t Общее решение:
a<1,
a t P 0
– спекулятивная
составляющая 2. Модель рациональных
ожиданий Недостаток –
низкая скорость обучения участников
рынка. Это открывает возможность для
интертепорального арбитража, т.е.
спекуляции на прогнозируемых изменениях
курса акций в последующих периодах. Чтобы устранить
это логическое противоречие, в 1970-х была
предложена модель рациональных ожиданий
(Р. Лукас). Суть модели – в
среднем рынок не может систематически
ошибаться в оценке курса активов.
Применительно к нашей модели это означает
следующее: инвесторы не должны
систематически ошибаться в оценке
стоимости акций. E t
– ошибка оценивания Рассмотрим
экстремальный вариант модели рациональных
ожиданий (модель с полным предвидением),
в которой ошибка оценивания равна 0. С модели с полным
предвидением предположим, что E t =0,
т.е.
Рассмотрим динамику
цен на акции в модели с полным предвидением. Условие арбитража: (1+r)
P t =dt P t+1
=(1+r) Pt-d (3) P t
является нестабильной, P t →,
поскольку (1+r)
>, если только не начинаем движение с
неподвижной точки: Если P t =
,
тоP t + k =
d=0,
P t +1 =(1+r)
Pt В модели полного
предвидения ожидания инвесторов играют
роль самовыражающегося пророчества,
цены на активы могут неограниченно
расти, т.к. инвесторы считают, что они
будут расти. Таким образом, в такой
модели спекулятивная компонента
стоимости акций доминирует над ее
фундаментальным значением.

 –линейная, если
а=1, под 45 0
– угол наклона.
–линейная, если
а=1, под 45 0
– угол наклона.









 ,
то
,
то
 ,
то
,
то


 ,
, ,
,

 (1)
(1) –управление
–управление (2)
(2) – общее решение однородного уравнения
(1):
– общее решение однородного уравнения
(1): и называется комплементарной функцией.
и называется комплементарной функцией. –любое частное
решение неоднородного уравнения (1).
–любое частное
решение неоднородного уравнения (1).




 – решение уравнения (1), то
– решение уравнения (1), то .
. – другое решение уравнения (1), то
– другое решение уравнения (1), то
 и проверим, является ли
и проверим, является ли решением уравнения (1).
решением уравнения (1). и добавим к нему
и добавим к нему ,
то мы получим решение уравнения (1).
Возникает вопрос, получим ли мы подобным
образом все решения уравнения (1). Докажем,
что это действительно так:
,
то мы получим решение уравнения (1).
Возникает вопрос, получим ли мы подобным
образом все решения уравнения (1). Докажем,
что это действительно так: и
и :
:



 - однородное,
- однородное,
 z t =ca t
z t =ca t -
- =ca t
=ca t

 =
= +ca t
+ca t =
= +
+ (2)
(2) =
ca t
=
ca t = a
= a  + U
+ U
 =
=
 =
= +
ca t
+
ca t






 с течением времени система достигает
состояния
с течением времени система достигает
состояния →
→ и соответствующим подбором уравнения
U
мы сможем достигнуть любого состояния.
Система (3) называется в таком случае
управляемой.
и соответствующим подбором уравнения
U
мы сможем достигнуть любого состояния.
Система (3) называется в таком случае
управляемой. ,
то с течением времени система примет
неограниченные значения вне зависимости
от уравнения и, следовательно, будет
неуправляемой.
,
то с течением времени система примет
неограниченные значения вне зависимости
от уравнения и, следовательно, будет
неуправляемой. (4)
(4)
 (5)
(5)
 ,
то
,
то
 ,
то
,
то для любогоt.
для любогоt.



 где d 0 ,
d 1 >0
где d 0 ,
d 1 >0 ,
где S 1 >0,
S 0 ≤0
(так как при цене 0 никто ничего не
выпускает).
,
где S 1 >0,
S 0 ≤0
(так как при цене 0 никто ничего не
выпускает).
 (*)
(*)

 илиS 1
илиS 1  в системе будут расходящиеся колебания.
в системе будут расходящиеся колебания.
 на
графике кривая
на
графике кривая



 -
ожидаемая стоимость акций в момент t+1.
-
ожидаемая стоимость акций в момент t+1.
 (1)
(1) -ожидаемая
цена на квартиру в следующем периоде.
-ожидаемая
цена на квартиру в следующем периоде. =33-2=31
тыс. дол.
=33-2=31
тыс. дол. =
= ,
где 0≤≤1
,
где 0≤≤1 =
=
 =
=
 -
метод экспоненциального сглаживания
(2)
-
метод экспоненциального сглаживания
(2) (1)
(1)

 (2)
(2)



 0
0 ,
где Р 0
– первоначальная стоимость акций.
,
где Р 0
– первоначальная стоимость акций. a t P 0
a t P 0
 0
0
 фундаментальная
стоимость акций.
фундаментальная
стоимость акций.

 - несмещенность
оценки, т.е.
- несмещенность
оценки, т.е.
 - является несмещенной оценкойP t +1 ;
или
- является несмещенной оценкойP t +1 ;
или
 =P t +1 +E t
=P t +1 +E t =P t +1
=P t +1
 (1+r)
P t =dtP t+1
(1+r)
P t =dtP t+1 =P t+1
=P t+1


Толкование сна магия в сонниках
Лейкоциты в крови: норма и отклонения Сколько должно быть лейкоцитов
Как привлечь в дом удачу и деньги: три эффективных ритуала
Урок русского языка "мягкий знак после шипящих у существительных" Урок игра ь знак после шипящих
Салат с курицей и шампиньонами слоеный - быстро и вкусно